ERCIM News 64January 2006Contents 
This issue in pdf Subscription Archive: Next issue: April 2006 Next Special theme:
|
by Michael G. Hinchey, Roy Sterritt, Christopher A. Rouff, James L. Rash and Walt Truszkowski
Future space exploration missions will exploit intelligent swarm technologies, enabling spacecraft to go where manned missions and traditional spacecraft simply cannot.
Planned NASA missions will exploit new paradigms for space exploration, heavily focused on the (still) emerging technologies of autonomous and autonomic systems. Traditional missions, reliant on one large spacecraft, are being complemented by missions that involve several smaller spacecraft, operating in collaboration, analogous to swarms in nature.
This offers several advantages: the ability to send spacecraft to explore regions of space where traditional craft simply would be impractical, greater redundancy (and, consequently, greater protection of assets), and reduced costs and risk, to name but a few.
ANTS: A Concept Mission
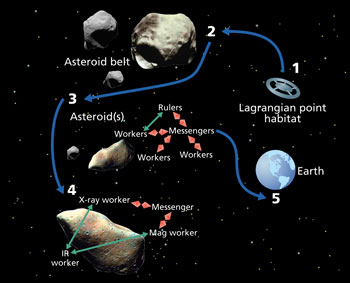
ANTS (Autonomous Nano Technology Swarm) is a concept NASA mission. In one of its sub-missions, Prospecting Asteroid Mission (PAM), a transport ship, launched from Earth, will travel to a point in space where gravitational forces on small objects (such as pico-class spacecraft) are all but negligible. From this point, termed a Lagrangian, 1000 spacecraft, which will have been assembled en route from Earth, will be launched into the asteroid belt. It is expected that as much as 60 to 70 percent of them will be lost during the mission, primarily because of collisions with each other or with an asteroid during exploration operations, since, having only solar sails to provide thrust, their ability to maneuver will be severely limited. Because of their small size, each spacecraft will carry just one specialized instrument for collecting a specific type of data from asteroids in the belt.
|
Approximately 80 percent of the spacecraft will be workers that will carry the specialized instruments (eg, a magnetometer or an x-ray, gamma-ray, visible/IR, or neutral mass spectrometer) and will obtain specific types of data. Some will be coordinators (called leaders) that have rules that decide the types of asteroids and data the mission is interested in and that will coordinate the efforts of the workers. The third type of spacecraft are messengers that will coordinate communication between the rulers and workers, and communications with the Earth ground station.
The swarm will form sub-swarms under the control of a ruler, which contains models of the types of science that it wants to perform. The ruler will coordinate workers, each of which uses its individual instrument to collect data on specific asteroids and feed this information back to the ruler, who will determine which asteroids are worth examining further. If the data matches the profile of a type of asteroid that is of interest, an imaging spacecraft will be sent to the asteroid to ascertain the exact location and to create a rough model to be used by other spacecraft for maneuvering around the asteroid. Other teams of spacecraft will then coordinate to finish mapping the asteroid to form a complete model.
A Complex Problem
New approaches to exploration missions such as ANTS augur great potential, but simultaneously pose many challenges. The missions will be unmanned and necessarily highly autonomous. They will also exhibit the properties of autonomic systems of being self-protecting, self-healing, self-configuring, and self-optimizing in order to assist in the survivability of the mission. Many of these missions will be sent to parts of the solar system where manned missions are simply not possible, and to where the round-trip delay for communications to spacecraft exceeds 40 minutes, meaning that the decisions on responses to problems and undesirable situations must be made in situ rather than from ground control on Earth.
NASA Goddard Space Flight Center has been collaborating with University of Ulster and Science Applications International Corp. (SAIC) on developing techniques and new self-paradigms, which may be applicable to future swarm-based missions. In addition, the degree of autonomy that such missions will possess would require a prohibitive amount of testing in order to accomplish system verification. Furthermore, learning and adaptation with the goal of continual improvements in performance will mean that emergent behavior patterns simply cannot be fully predicted through the use of traditional system development methods.
The Formal Approaches to Swarm Technology (FAST) project aims at devising a formal approach to the development and verification of complex swarm-based systems, using ANTS as a baseline for comparing approaches.
An effective formal method for use in the ANTS mission must be able to predict the emergent behavior of 1000 agents operating as a swarm, as well as the behavior of the individual agents. Crucial to the success of the mission will be autonomic properties and the ability to modify operations autonomously to reflect the changing nature of the mission. For this, the formal specification will need to be able to track the goals of the mission as they change and to modify the model of the universe as new data comes in. The formal specification will also need to allow for specification of the decision-making process to aid in the decision of which instruments will be needed, at what location, with what goals, etc.
The project is currently working on integrating existing formal techniques and on building tools to support the integrated method.
Links:
ANTS website: http://ants.gsfc.nasa.gov
NASA Software Engineering Laboratory: http://sel.gsfc.nasa.gov
UU Autonomic Systems: http://www.infj.ulst.ac.uk/~autonomic
Please contact:
Dr. Mike Hinchey, Director, NASA Software Engineering Laboratory, USA
Tel: +1 301 286 9057
E-mail: Michael.G.Hinchey![]() nasa.gov
nasa.gov