As everything becomes dynamic and pluggable, we must envisage applications created through a combination of ambient elementary services without the help of an infrastructure. The WaveCar project investigates the notion of elementary services in a highly dynamic environment, in order to create what are now referred to as ambient and hybrid networks.
ARES - the Architecture of Network of Services - has been set up as a new INRIA Project in 2000 and is now hosted by the INSA of Lyon, France. ARES works on the design, modelling and validation of software and hardware elements for deploying services and protocols into networks. Network architectures are becoming increasingly complex and heterogeneous both in terms of the technologies on which they are based and the areas in which they are deployed. The notion of communicating objects and ambient networks, in which interactions between network elements are spontaneous and transparent to the end user, significantly complicates the deployment of these infrastructures. Thus, new models have to be realised, new approaches have to be validated, and new architectures proposed with two principle concepts in mind: mobility and embedment.
ARES is currently developing dynamic software components that would be useful in middleware approaches, taking into account the specific characteristics of hybrid networks,namely:
- in the design of elementary services, mobility must be considered the rule, rather than the exception
- potential loss of availability of some nodes and strong variation in the quality of service is also the rule, not the exception.
Many concepts have to be revisited because of this particular context, especially the service discovery engine and notions of service deployment and administration.
WaveCar
The aim of WaveCar is the dynamic deployment of services in a distributed environment. In this project, mobility is one of our main interests, since deployment of services will take place on a car-embedded platform. The idea is to equip the car with a system which will provide synchronisation with the requisite client services through an Internet connection.
The other important point is that the car is not always connected to the network; in fact it must be near an access point to get a connection through radio waves. This off-line mode shows the importance of synchronisation between the client expression of needs and the effective deployment of services.
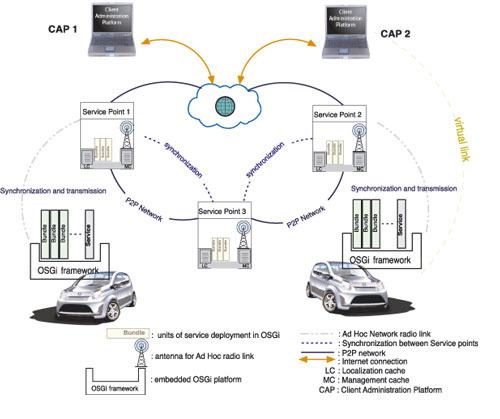
Our architecture separates three important elements of our system - the client administration platform, the service point (access point) and the autonomous physical entity:
- Client Administration Platform (CAP): This platform software is installed on the client computer. It has three main functions: to authenticate the client, to localise the client’s car and to request management. The client can visualise the actual state of the embedded system and take management actions. These are performed immediately if the car is connected to the network, otherwise synchronisation will be performed next time the car connects.
- Service Point: Service points are the core of the system. These are all connected through a P2P network. This is an interface between the CAP and the autonomous physical element. It essentially provides a network connection to the embedded system, a caching system for localisation and requests management. This caching system is essential for synchronisation. All service points must communicate in order to achieve homogeneous management tasks like physical localisation of cars or event-sending for upgrades concerning a special Autonomous Physical Element.
- Autonomous Physical Element (APE): This is the car's embedded system. In our case it is a platform for the deployment of services which is in conformity with the OSGi specification. The role of this platform is to dynamically load new services on demand.
Services are represented by bundles which can be downloaded from a service point and directly managed through the service platform. These services could be MP3 players, vocal post-it, mail clients etc.
Links:
http://citi.insa-lyon.fr/
http://darts.insa-lyon.fr/
http://www.insa-lyon.fr/
Please contact:
Stéphane Frénot, CITI Laboratory at INSA-Lyon Scientific and Technical University, France
Tel: +33 04 72 43 64 22
E-mail: stephane.frenot@insa-lyon.fr