

ERCIM News No.44 - January 2001 [contents]
ERCIM News No.44 - January 2001 [contents]
by Michele Marini, Ovidio Salvetti, Sergio Di Bona and Ludovico Lutzemberger
A model of the brain has been developed at IEI-CNR on the basis of data acquired via Computer-assisted Tomography (CT), Magnetic Resonance (MR) scans and other types of information gathered from anatomical atlases.
A model of the brain has been created by means of geometrical and functional data-fusion so that a characterization of each of the internal structures is possible. A set of deforming agents has been placed over the geometry of the three-dimensional model in order to simulate the evolution of different pathological intra-cranial phenomena such as haemorrhages, neoplasm, haematoma etc. and to describe the consequences that are provoked by their removal as well as the influences they have on the anatomical and neuro-functional structures of the brain. This model can be used effectively in virtual neurosurgery. The deforming agent action is an isotropic pressure that can be studied using a number of ëlines of forceí traced radially, within the geometry of the model. These lines start from a fixed region, chosen as the source of expansion, to the bone boundary limits, as the skull represents a physical limitation to the cerebral expansion phenomena.
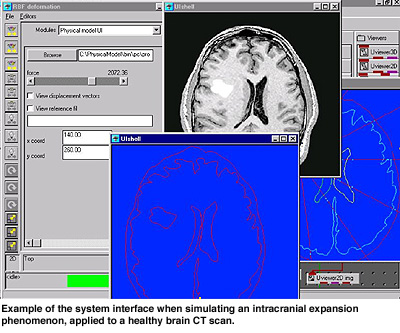
The tissue elastic response can be simulated as a series of springs, each of which is associated with the underlying tissue section. The reaction of a tissue to the deforming action develops continuously in all directions and causes a resultant that is equal and opposite to the modifying charge. An approach of this type necessitates some corrections to adapt the discretization to the real-world situation. This can be done by assigning a ëpressure transmission coefficientí to each tissue, which simulates the force dispersion and is transmitted from one spring to another. Moreover, the effects induced by the presence of a liquid mass, which in our study can be considered as static, must also be taken into account. The physiological mechanism adopted also favours the use of a spring model in the case of those overlapping ëlines of forceí sections that contain liquid. Each straight line coming from the initial point of development represents a direction of the force field whose vectors are oriented from the centre of the source of the expansion to the external contour. The intersections where the straight lines cross regional contours define the knots that are used as control points for the application of the geometric deformation. Each section comprised between two adjacent control points lying on the same line is associated with a single spring that rules the elastic behaviour of the underlying region. The generic spring is then characterized by a set of parameters whose values depend on the regional characteristics. Under AVS/Expressí, an interactive system has been implemented which includes both single data-set slices and three-dimensional deformation tools to interactively control the virtual actions (see figure).
Please Contact:
Ovidio Salvetti - IEI-CNR
Tel: +39 050 315 3124
E-mail: salvettii@iei.pi.cnr.it