

by Ansgar Bredenfeld, Herbert Jaeger and Thomas Christaller
Speed and complexity of behaviors are key factors for mobile robots acting in unpredictable, dynamic environments. The Behavior Engineering (BE) team of the GMD Institute for Autonomous intelligent Systems (AiS) focuses on the combination of these two research issues. We use soccer playing robots as demonstrator platform since they provide an ideal benchmark environment for interdisciplinary research on mobile robotics.
Our approach to robot programming is based on a mathematical model for robot behaviors which we developed. It integrates central aspects of a behavior-based approach, robust control, and a dynamical systems representation of actions and goals. Robot behaviors are specified through ordinary differential equations, forming a global dynamical system made of behavior subsystems which interact through specific coupling and bifurcation-induction mechanisms. Behaviors are organized in levels where higher levels have a larger time scale than lower levels. Since at the elementary level the activation of behaviors (activation dynamics) is separated from their actuator control laws (target dynamics), we named our approach ‘Dual Dynamics’. An important feature of Dual Dynamics is that it allows for robust and smooth changes between different behavior modes, which results in very reactive, fast and natural motions of the robots.
Dual Dynamics Design Environment
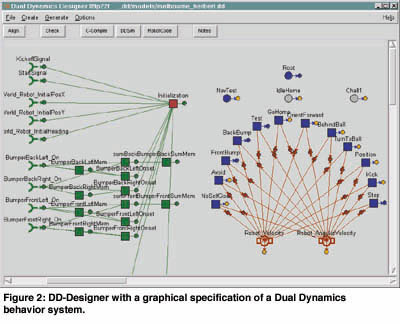
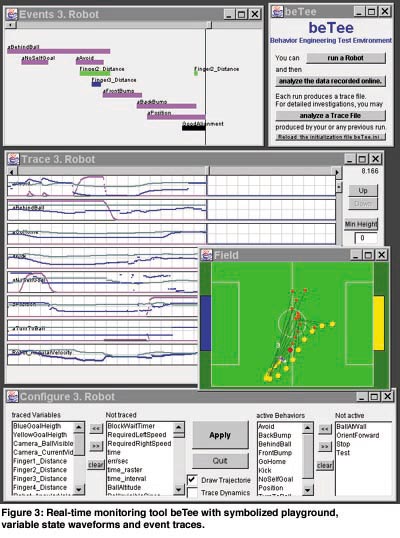
The successful design of robot software requires means to specify, implement and simulate as well as to run and debug the robot software in real-time on physical robots. It was a major challenge to make the Dual Dynamics approach productive in a state-of-the-art design flow. The result of our work is the integrated Dual Dynamics Design Environment. It allows to design Dual Dynamics models on a high level of abstraction and to synthesize all code artifacts required to make Dual Dynamics models operative in practice: a documentation, a simulation model, control programs for physical robots and a parameter set for generic test and debug tools. The Dual Dynamics Design Environment comprises the graphical specification and code generation tool Dual Dynamics-Designer, the simulator DDSim and the real-time monitoring tool beTee:
GMD-Robots
The test bed and demonstrator application for our Dual Dynamics approach are soccer playing robots. They take part in the mid-size league tournaments of the international RoboCup contest, a very demanding benchmark for mobile robots. RoboCup tournaments have been organized since 1997 with a yearly increasing number of participating teams from over the world. This year, the first European competition will be held in Amsterdam at the beginning of June.

Our robots were custom-built in the Institute for Autonomous intelligent Systems. As hardware we employ 2 degree of freedom, 1-PC-3-micro controller equipped robots that rely on a commercial vision system for ball and goal detection, infrared-based distant sensors, standard bumper sensors, odometry and a piezo-gyro. Two robots are equipped with laser scanners. We utilize the DD design environment to specify, document, simulate, run, test and debug these robots.
Future Research Directions
The sensory uncertainty a robot faces must be captured by ‘non-additive noise’ models, which are mathematically similar to the models used in speech understanding: Hidden Markov Models (HMMs) and Partially Observable Markov Decision Processes (POMDPs). Known learning algorithms for such models are computationally challenging, which impedes their use beyond simple cases. A novel mathematical approach to stochastic modeling, observable operator models (OOMs) has been developed in the BE team. OOMs are more expressive than HMMs or POMDPs, but actually can be learnt more quickly. Furthermore, OOMs allow to compute reward-optimal action decisions extremely quickly. In the future, therefore, our soccer robots will be equipped with OOM modules - first, for sensor preprocessing and state estimation, but second, we will also stepwise recast entire DD behaviors from deterministic differential systems into fully stochastic OOM modules.
Conclusions
The integrated DD Design Environment and our RoboCup robots are the ideal test bed for research on autonomous, mobile robots. Here, we focus on extensions to the Dual Dynamics scheme and on ‘Observable Operator Models’. Both emphasize the dynamical systems nature of behaviors, with OOMs additionally capturing the stochastic nature of a robot’s experience and acting.
Since DD-Designer was constructed using a novel generative approach to rapid software prototyping (APICES), we were able to continuously evolve the DD Design Environment from a first shot prototype in late 1998 until now. This prototype evolution fosters incremental design and allows us to add new features to the environment without breaking a productive design flow.
At present, we plan to transfer the DD Design Environment to a broader community in education, research and industry. To our conviction, it is a well suited tool kit to learn and explore different behavior-based approaches to robot control not just DD. Furthermore, the openness of our environment, its well-defined interfaces and its adaptable code generators make it worthwhile to tailor the DD Design Environment to other application domains besides soccer robots.
Links
RoboCup: http://www.robocup.org
Behavior Engineering Team: http://ais.gmd.de/BE
Dual Dynamics Design Environment: http://ais.gmd.de/DD
OOMs: http://www.gmd.de/People/Herbert.Jaeger/Publications.html
Please contact:
Ansgar Bredenfeld - GMD
Tel: + 49 2241 14 2841
E-mail: bredenfeld@gmd.de