Research in Control and System Theory
by Jan H. van Schuppen
Current and recent research in control and system theory are briefly discussed as well as the role of the ERCIM Working Group Control and System Theory in ERCIM.
Where does an ordinary citizen encounter control? Control is experienced in processing of telephone calls, in car steering, in modern forms of information and control of motorways, in stabilization control of air planes, in orbit control of satellites for hand held phones and tv channels, etc. Almost all engineering products operate properly only because control is used to safeguard their proper operation and to optimize their performance. In the last two decades motivating control problems have arisen in control of high-performance communication networks, of motorway traffic, in air traffic control, of chemical plants, and in finance and insurance to name only a few areas. Control and system theory are highly relevant to the functioning of the Western industrialized societies.
At about half of the ERCIM institutes research in this research area is carried out in designated research groups while at other institutes control is sometimes integrated in research of computer science.
Problems of Control and System Theory
What is control? Engineering systems require command signals such that controlled variables remain at a specified setpoint say. This function is called control. Control is also the name for a research area in which the design of controllers is studied at the engineering level and in which synthesis of controllers is studied at a theoretical level. System theory is the research area in which study is made of mathematical models for control and signal processing. Besides engineering, mathematics and computer science are the main academic disciplines used in control and system theory.
A system is a mathematical model of an engineering phenomenon that involves an input signal, an output signal, and a state function. The input can be commanded by a controller. The output refers to that part of the state function that can be observed and as such is available to the controller. At any time the current state and the current input value determine the dynamics of the state and the current output value. Systems are usually classified according to the spaces involved and to the equations that specify the dynamics. Thus there are linear, bilinear, polynomial, and stochastic systems depending on the character of the transition map.
Control is based on the principle of feedback. In the closed-loop system the output of the system is used by the controller to determine the input to the system. The control problem for a system is then to synthesize a controller such that the closed-loop system meets the control objectives. General control objectives include: stability of the state function, optimization of performance, robustness with respect to noise signals and poorly modeled dynamics, and avoidance of unsafe states. The engineering constraint of a controller that can be implemented with finite memory is essential.
Control and signal processing require mathematical models in the form of a system with finite memory. Consider a map from input signals to output signals. A realization is a system in a prespecified class such that the associated map from inputs to outputs associated with the system equals a considered map. The realization problem is to establish conditions for the existence of a realization. Furthermore, it also includes the classification of all such realizations. The system identification problem for a pair of observed input-output signals is to determine a system such that the input-output signals approximate the specified input-output signals.
Current and Recent Research
There is a large body of literature on control of linear systems. In the last decades much attention has been given to robust control of linear systems. Currently there is attention for control of systems with saturations and with space constraints such as linear systems for artificial neural nets. Motivated by coding theory, linear systems on groups are receiving renewed interests. Primarily motivated by mechanics, control of nonlinear systems has developed within a differential geometric framework. Other engineering areas lead to bilinear systems and to polynomial systems. Control of stochastic systems has led to a body of results for filtering and stochastic control. Optimal stochastic control with an exponential type cost function has led to results on robust control and to interpretations of large deviations. Problems of detection and failure diagnosis for stochastic systems and for discrete event systems motivated by engineering problems have led to theory and algorithms that are applied in wide ranging fields.
Realization theory has started with the work of R.E. Kalman for linear finite-dimensional systems. Since then it has been generalized to other classes of systems and from input-output maps to input-output trajectories. The behavioral approach to realization theory concerns the distinction of observed signals into input and output signals. Stochastic realization theory has been developed for Gaussian systems and finite-stochastic systems. For system identification of linear systems and of Gaussian systems there is a well developed theory for single-input-single-output systems. For multi-input-multi-output systems algorithms based on stochastic realization theory and on the singular value decomposition of numerical linear algebra are quite effective. The approximation problem of system identification takes inspiration from stochastic complexity theory which in turn is based on Kolmogorov complexity. Adaptive control of linear and Gaussian systems is well developed for single-input/single-output systems but there remain difficult conceptual problems for the multi-input/multi-output case. The interaction of control, state estimation, and parameter estimation needs more fundamental thinking.
Motivated by the use of computers for control, there has been developed a control and system theory for discrete-event systems. Modeling formalisms used include automata, Petri nets, process algebras, and linear systems over the (max,+)-algebra. This research benefits from interaction with theoretical computer science. Results concern control synthesis, hierarchical control, and failure diagnosis. Applications have been made in control of communication networks, manufacturing, chemical process control, road traffic, and air traffic control. Research for the class of hybrid systems is primarily motivated by the use of computers for control of engineering systems. The interaction between the discrete and the continuous dynamics is in some models so tight that these must be treated jointly.
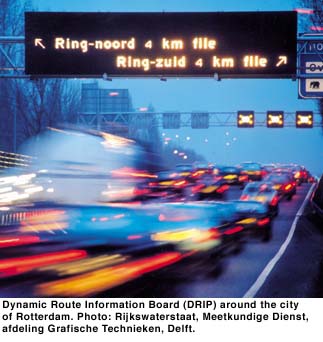
Control of motorway traffic The traffic intensities in motorway networks in European countries is so high that traffic queues are a daily phenomenon. Governments now promote the use of control measures to alleviate the most recurrent congestion. Control measures currently used or planned include: warning upstream traffic about traffic queues, ramp metering (access control on on-ramps), dynamic adjustable speed limits, information provision about the state of the network, routing control, and dynamic lane control. Routing control has been investigated at CWI as part of a European project in cooperation with road agencies, research institutes, and universities. Design of routing control requires fundamental thinking about the interaction of prediction and control. The appropriate formulation in terms of control theory is that of a dynamic game with the Nash equilibrium concept. Because of the complexity of the problem, approximations of the control law must be considered. A control algorithm for routing control has been formulated and evaluated by simulation at CWI. Actual implementation requires further development by the national road agency.
ERCIM Working Group Control and System Theory
During a workshop at SZTAKI in Budapest, Hungary in November 1995 the participants decided that it was advantageous to their contacts to constitute an ERCIM working group. The organizational structure consists of teams at several of the ERCIM institutes and of a Steering Committee. The activities of the working group consist of bi-annual workshops, contacts about the ERCIM Fellowship Programme, and informal contacts on research. The achievements are the increased contacts between the teams on ERCIM matters and on research. Five of the nine teams of the ERCIM Working Group also participated in a series of EU sponsored research projects in system identification.
A list of the teams with their Steering Committee members follows:
• CNR - LADSEB Systems Theory Group in Padova, Italy (Andrea Gombani)
• CRCIM Institute for Information Theory and Automation (UTIA) in Prague, Czech Republic (Vladimir Kucera)
• CWI Research Group System and Control Theory in Amsterdam, The Netherlands (Jan H. van Schuppen)
• INRIA Research Group Meta2, Rocquencourt, France (Jean-Pierre Quadrat)
• INRIA Research Group MIAOU, Sophia Antipolis, France (Laurent Baratchart).
• INRIA Research Group on Signals, Models, and Algorithms, Rennes, France (Francois Le Gland).
• INRIA Research Group CONGE, INRIA Lorraine, Metz, France
(Abderrahman Iggidr).
• SICS Division of Optimization and Systems Theory, Royal Institute of Technology, Stockholm, Sweden (Anders Lindquist).
• SZTAKI Systems and Control Laboratory, Budapest, Hungary (László Gerencsér).
Research Perspectives
Research in linear systems is likely to focus attention on systems with space constraints and on systems in algebraic structures. Research in positive linear systems is expected to receive relatively more attention. It is motivated by modeling in biology, environmental modeling, and economics. Control and system theory of nonlinear systems will develop further with differential geometry and algebra. The class of polynomial systems is likely to develop with computer algebra packages. Control and filtering of stochastic systems is expected to grow in hidden Markov models and for stochastic systems with exponential families of probability distributions. Adaptive stochastic control needs further conceptual progress. Applications of stochastic control are likely to occur in mathematical finance and in communication networks. Control of discrete-event systems is likely to progress in hierarchical and decentralized control so as to deal with complexity issues. Control of hybrid systems is expected to develop the interaction between the discrete and the continuous dynamics.
There is likely to be increased efforts in the development of software tools more so than in the past, not only for numerical computations but also for computer algebra or symbolic computations for linear systems, for control of discrete-event systems, and for hybrid systems.
The ERCIM Working Group will be most effective if the research leaders can have regular in-depth discussions on future research directions of their teams.
Please contact:
Jan H. van Schuppen - CWI
Tel: +31 20 592 4085
E-mail: J.H.van.Schuppen@cwi.nl