ERCIM News 65April 2006Special theme: Space Exploration Contents This issue in pdf Subscription Archive: Next issue: July 2006 Next Special theme:
|
by Jordi Duatis, Cecilio Angulo and Joan Mas
Recent developments in the International Space Community have shown there is a rising interest in the human exploration of outer space. In particular, the objective of sending a manned mission to Mars by 2030 has been set. The feasibility of such a mission will require Life Support Systems (LSS) able to provide vital elements to the exploration crew in an autonomous, self-sustained manner, as re-supply from Earth will not be possible. Bio-regenerative LSS (BLSS) are considered to be the LSS technology alternatives that can meet this demand. Developing effective BLSS is a challenge for the Control community because of the high degree of automation, indeterminism, non-linearity and total instability. Agent-based approaches are being analysed as a suitable means of overcoming these difficulties.
Life Support Systems (LSS) provide the necessary conditions to sustain human life in a hostile environment over prolonged periods of time. Current LSS used in manned spacecrafts (eg the International Space Station) control the atmosphere composition (ie the percentages of oxygen, nitrogen and carbon dioxide) and regulate pressure and temperature by means of physico-chemical processes, most of which require periodic re-supply of fungible materials. Other vital elements are to some extent recycled (eg water) or uploaded from Earth (eg food). Re-supply is a major problem for the feasibility of long-term planetary missions. Such missions are currently in the scope of Space Exploration programs encouraged by ESA or NASA, whose objective is to establish permanent manned outposts, first on the moon and later on Mars, by 2030.
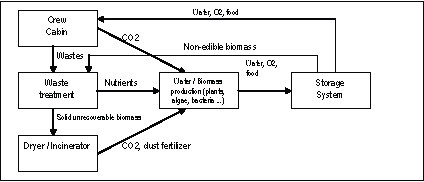
A new generation of Biological Life Support Systems (BLSS) is starting to be developed (eg NASA’s BIOplex and ESA’s MELiSSA). These use biological organisms (bacteria, algae, plants etc) to regenerate air, water and food with the objective of complete self-sufficiency. Microorganism cultures are employed to recycle water from wastes; higher plants are an essential source of fresh food through cultivation and harvesting, water is recycled through plant transpiration, and oxygen is produced by photosynthesis.
The goal of BLSS is very ambitious, as the fact of using living beings generates a problem in the determinism of the system. These systems are highly non-linear, with a high level of uncertainty in their behaviour, making it impossible to perform a complete analytical modelling of the processes. It is therefore necessary to develop, in parallel with the biochemical and physiological studies, new approaches to system control (Figure 1).
|
Model-based control systems will not be successful since they cannot deal with incomplete or inaccurate information. For instance, the maturity level of the crop must be assessed indirectly using several variables (atmosphere gas composition, plant colour, biomass, time from seeding etc). In addition, these variables will depend on a great number of factors, making predictability very poor.
New control-system architecture to cope with these problems can be effectively implemented using a Multi-Agent System (MAS). This approach allows the problem to be broken down into small parts, each dealing with specific tasks but in a coordinated manner, performing as an organization with a common objective and sharing a set of rules. In addition, designing this system as a multi-agent network will allow specific control solutions to be applied to each part as needed. The different types of controllers will become encapsulated in the agent structure and only relevant information will be shared to enable monitoring and global control. Another benefit will be the reconfiguration capability, in cases of, for instance, failure of part of the system or the need to adapt the system to new objectives.
|
The proposed MAS is organized in a layered structure. In the first layer, agents will be in charge of the planning and coordination of necessary tasks and interaction with the crew, requiring their intervention only when mandatory. The use of Expert Systems in this layer will allow actions to be planned in a systematic and efficient manner. For example, achieving an optimal harvest depends not only on the maturity of the crop but also on food requirements and storage capability.
In the second layer, agents will control the execution of these tasks, interfacing with the sensors and actuators of each LSS subsystem and notifying relevant process data, progress information or unexpected events to the planner layer. This layer will be heterogeneous in the sense of implementation, but for each process control an agent will be on top, permitting a standard communication with the rest of the system.
An especially critical problem to be solved is the amount of supervisory information that this system will generate. Agents specializing in information synthesis are needed to process this information before communicating it to the crew. Automated supervision of the processes will be required, providing only relevant information and requiring crew attention only when mandatory.
Links:
http://www.nte.es/
http://www.estec.esa.nl/ecls/
Please contact:
Jordi Duatis, NTE SA, Spain
E-mail: jordid![]() nte.es
nte.es