| |
The Many Faces of Behavior
by Torbjørn Dahl
At the University of Southern California (USC), the Interaction Lab under Professor Maja Mataric takes a multi-pronged approach to studying embodied systems and the elusive concept of 'behavior'.
As a successful and growing part of USC's Center for Robotics and Embedded Systems, the second largest center for robotics in the world, the Interaction Lab has the resources to attack the problem of embodied behavior on many fronts. The research program includes the recognition, representation, adaptation, transfer, and synthesis of behavior. The application domains span a wide range of embodied systems and use hardware as diverse as humanoids, robot dogs, and groups of mobile robots. Anchored in the Behavior-Based (BB) control paradigm, the Interaction Lab's work is developing BB control into a mature field rich in applications and connections to other frameworks for analysis and control.
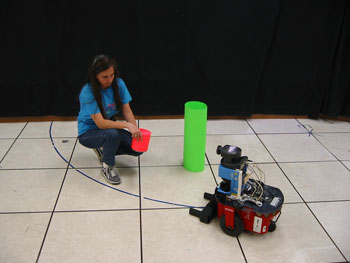 |
A Pioneer mobile robot learning from a human teacher.
© USC Robotics Lab. |
Recognition, Adaptation, and Synthesis of behavior place different requirements on the internal representation of behavior within a robot. Here we present results from three current projects. The first project, Primitive-Based Imitation Learning, studies the role of primitives, including oscillatory, discrete, and postural primitives, in Imitation Learning. The second project, Natural Methods for Human-Robot Interaction, demonstrates imitation learning and the transfer of behavior between humans and robots. The final project, Scheduling with Group Dynamics, demonstrates a distributed task-allocation algorithm that allows a group of autonomous robots to optimize their performance in environments ill-suited for classic scheduling algorithms.
Primitives-Based Imitation Learning
Rather than explicitly planning the trajectory of motion of a limb anew for each movement, this project is inspired by theories that posit that human beings tend to chose from a limited but possibly large repertoire of movement primitives. The inspiration for primitives-based motor control is based on evidence from experiments carried out on frogs and rats, where complete movements (such as reaching and wiping) could be produced by potentiating an electrode in different regions of the spine of spinalized frogs.
Primitive-Based Imitation Learning, focuses on developing a model of learning by imitation. As one of the most powerful yet poorly understood forms of learning in nature, imitation presents an important research problem in AI and machine learning, as well as in the behavior and neural sciences. The recent successes of this project include new technologies for motion capture and algorithms for extracting primitives automatically. Currently active members of this project are PhD students Evan Drumwright, Chad Jenkins, Amit Ramesh, and Monica Nicolescu.
Natural Methods for Human-Robot Interaction
The goal of this project, mainly the work of PhD student Monica Nicolescu, is to extend a robot's model of interaction with humans so that it can induce changes in a human's behavior and also express its intentions in a way that humans can easily understand. The challenge the project addresses is allowing interaction to occur without the need for an explicitly shared vocabulary between the robot and the human. One important advantage of using a body language technique is that the method is not restricted to having a robot with a humanoid body or face: the approach does not require structural body similarities between the interacting agents in order to achieve successful interaction. Even if there is no exact mapping between a mobile robot's physical characteristics and those of a human user, the robot is still able to convey a message to the human. The approach relies on implicit interaction, which can be achieved by designing an applicable subset of body movements and behaviors for the robot which are already known and understandable by humans through their common sense.
Multi-Robot Task Allocation through Vacancy Chains
This project tackles the problem of group dynamics in Scheduling and is mainly the work of Torbjorn Dahl, a post-doctoral research associate. Existing task allocation and scheduling algorithms, including task-allocation algorithms for multi-robot systems, generally assume that tasks are independent. This assumption is often violated in groups of cooperative mobile robots, where the group dynamics can have a critical impact on performance. The project has developed a multi-robot task allocation algorithm that is sensitive to group dynamics. An algorithm based on vacancy chains, a resource distribution process common in human and animal societies, has been developed.
In particular, the project has studied the problem of cooperative transportation. It has been demonstrated, through experiments in simulation, that if robots keep local task utility estimates, and follow a greedy task selection policy, the interactions in the group cause the collection of learned policies to converge toward an optimal allocation pattern as defined by the vacancy chain framework.
As the robots are continuously updating their individual utility estimates, the vacancy chain algorithm has the additional property of adapting automatically to changes in the environment, eg, robot breakdowns or changes in task values. Experiments show that in the case of such changes, the vacancy chain algorithm consistently outperforms random and static task allocation algorithms.
Links:
USC the Interaction Lab: http://robotics.usc.edu/~agents
USC's Center for Robotics and Embedded Systems: http://cres.usc.edu
Natural Methods for Human-Robot Interaction: http://robotics.usc.edu/~monica/Research/HRI/hri.html
Multi-Robot Task Allocation through Vacancy Chains: http://robotics.usc.edu/~tdahl/projects/vacancychains.html
Please contact:
Torbjørn Dahl, Interaction Lab, University Southern California, USA
E-mail: Torbjorn-Semb.Dahl@ffi.no
|


