The RoboCare Project: Multi-Agent Systems for the Care of the Elderly
by Amedeo Cesta and Federico Pecora
The RoboCare project focuses on the development of distributed systems in which software and robotic agents contribute to the common goal of generating active services in environments in which humans may need assistance and guidance, such as health care facilities.
Thanks to recent technological advances, there are now many potential applications for robotics including multi-agent systems. The aim of the RoboCare project is to study issues and challenges involved in the design of systems for the care of the elderly that adopt both fixed and mobile heterogeneous agents. These agents can be robots, intelligent sensors or possibly even humans. RoboCare shares some aspects with other projects for the assistance of elderly people, such as Pearle, the mobile robotic assistant for the elderly (M. Pollack et. al.) and the Assisted Cognition Project (H. Kautz et. al.), but addresses the particular goal of creating a heterogeneous multi-agent environment for generating user services.
The ambitious goal of providing support for the elderly with the use of intelligent systems is not merely aimed at automating certain tasks. The philosophy underlying this application of cognitive technology is to enhance the quality of care for the elderly, by employing an infrastructure of expert systems which cooperate in order to provide services. This requires, on one hand, the design of intelligent agents endowed with advanced learning capabilities, capable of complex symbolic reasoning tasks and high levels of interaction with humans. But in a world in which pervasive computing is the name of the game, the integration of intelligent capabilities in aiding tools is no longer enough. Tomorrow's health-care institution will be equipped with intelligent systems which are capable of interacting with humans; RoboCare will address the issue of enabling these systems to work together.
The implementation of collaborative behaviours for intelligent systems is motivated by the necessity of providing constant care and support for people with disabilities. When it comes to caring for the elderly, intelligent systems aim at supporting them in all aspects of daily life, providing decision making, reminding and warning functionality. Such complex tasks necessarily involve teams of agents (be they robots, intelligent sensors or physicians). For instance, Alzheimer patients would benefit from a system which reminds them about certain sequences of actions to be performed (such as switching off the gas after turning off the stove and wearing glasses before wandering out of the bedroom). In its simplest form, such a system would be made up of a series of agents, like a gas monitor and a mobile robot capable of advising the assisted person. All the actors in the system would clearly be capable of carrying out individual reasoning, but would also need to collectively reason about the situations which can occur.
 |
|
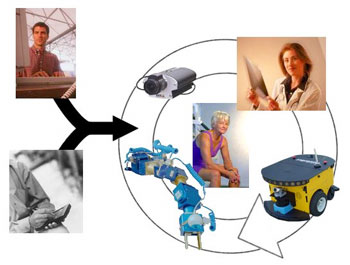
Overall system structure: operator level system control
and distributed environment.
|
Creating such tightly coupled intelligent systems presents an important challenge for the AI and robotics communities. On one hand, researchers have been successful in creating teams of robots which are capable of cooperating in tasks such as foraging, unknown environment exploration and simplified forms of soccer playing. On the other hand, the AI community has advanced in the study of planning and scheduling, and has developed mature technology for automated problem solving. The realization of a complete system for the aid of the elderly to be employed in a complex, real world environment such as a health-care institution or a home requires a tight integration of these technologies. The system must provide more than a loose coordination between components, in other words, it must enable a synergetic cooperation among the agents. Thus, a supervision framework which maintains a global view of the system and provides control functionalities for human operators must be provided. On the other hand, in order to ensure robustness and reliability, the autonomous agents must be endowed with well-defined cooperative behaviours.
However, the task of providing monitoring support is but a small aspect of the functionalities that such a system must implement. Caring for elderly people is often all about routine, such as scheduling walks and daily social events. As a consequence, the system should be capable of planning and scheduling for such needs as well as interpreting them.
A great deal of resources are being invested in the investigation of user-acceptance of the technology, in terms of the psychological impact of robotic agents providing services for the care of the elderly. Since the level of social interaction which can be obtained between robotic agents and human beings is related to familiarity, we are also investigating the use of Aibo™ robots for monitoring tasks.
Let us conclude by saying that the issues which need to be addressed in the context of complex systems for the care of the elderly are communication, knowledge representation, human-machine interaction, learning, collective and individual symbolic reasoning, only to name a few. RoboCare is made possible by the cooperation of a number of participating units, which include leading Italian universities and various departments of the National Research Council (CNR). Thanks to the numerous units involved, the RoboCare project can count on experts from many fields of cognitive science and technology.
RoboCare is funded by MIUR (the Italian Ministry for Research and Education) and is coordinated by the Institute for Cognitive Science and Technology of CNR.
Please contact:
Amedeo Cesta, ISTC-CNR
E-mail: cesta@ip.rm.cnr.it
|


