

by Panos E. Trahanias
The TOURBOT project is a R&D activity funded by the Information Society Technologies Programme of the European Commission. TOURBOT aims at developing alternative ways for interactive museum tele-presence, employing the novel approach of site viewing through the ‘eyes’ of robotic avatars.
The goal of this project is the development of an interactive TOUr-guide RoBOT (TOURBOT) able to provide individual access to museums’ exhibits and cultural heritage over the Internet. TOURBOT operates as the user’s avatar in a museum by accepting commands over the Web that direct it to move in its workspace and visit specific exhibits. The communication network is, thus, effectively extended by the introduction of interactive, mobile robotic platforms as terminal nodes. The imaged scene of the museum and the exhibits, is communicated over the Internet to a remote visitor. As a result the user enjoys a personalized tele-presence to the museum, being able to choose the exhibits to visit, as well as the preferred viewing conditions (point of view, distance to the exhibit, resolution, etc). At the same time, TOURBOT is able to guide on-site museum visitors providing either group or personalized tours.
In order to realize the TOURBOT system, a multimedia Web interface will allow people to interact with the tour-guide system over the Internet. Furthermore, an on-board interface will facilitate interaction with on-site visitors of the museum. Using the Web interface, people all over the world will be able to tele-control the robot and to specify target positions for the TOURBOT system. Camera controls will be used to choose the part of the exhibition the user wants to inspect in more detail. The robotic tour-guide will possess a multimedia information base providing a variety of information about the exhibition at various levels of detail. Thus, the TOURBOT system will serve as an interactive and remotely controllable tour-guide, which provides personalized access to exhibits with a large amount of additional information.
A tele-operated interactive tour-guide robot requires a high degree of autonomy since it operates in a populated environment in which humans are also present. Therefore, the project includes the development of a safe and reliable navigation system for TOURBOT. The robotic avatar will be equipped with a series of state-of-the-art sensors that allow it to acquire information about its environment. The navigation system uses this sensory information to adapt the robot’s internal model of the environment and to plan the robot actions.
A New Paradigm in Remote Access
The TOURBOT project introduces a new paradigm in providing access to cultural heritage exhibits. Through the introduction of museum visiting via a robotic avatar, it facilitates immersive tele-presence with advanced visualization capabilities. Full access to cultural exhibits is granted to the user, in the sense that the latter is able to choose the exhibits to visit, as well as the preferred viewing specification (point of view, distance to the exhibit, resolution, etc). The approach employed in the current project introduces a novel model of augmented environments, in that it allows human interaction with and workspace exploration of remote sites by means of a robotic avatar.
As a unified service to remote users, TOURBOT extends current communication networks by allowing mobile robots to be part of the overall structure. Such a mobile agent acts as the user’s avatar, operating in a physical environment that is perceived by the user through the robot’s sensors. Therefore, TOURBOT results contribute towards the seamless integration of networks and mobile agents for providing full user access to exhibitions.
The Internet is a very fast evolving technology that electronically connects distant sites; however, up to now, electronic networks serve mainly to exchange and acquire information. In some cases this information is pictorial by means of images taken in “real time” with a stationary Web-camera. To take full advantage of a network such as the Internet, it would be desirable to get real physical interaction with the remote site being visited. Robots, and especially mobile platforms, can extend the Internet towards an interactive platform that allows actions to be carried out and dynamic information to be exchanged between distant sites. The TOURBOT project implements exactly the above concept for the particular case of museums as remote sites. In other words, it augments current networks by substituting a terminal node with a mobile platform.
Workplan
The TOURBOT project addresses the development of a robotic avatar, able to provide individual access to museums’ exhibits over the Internet. Such mobile agents allow virtual tele-presence in physical environments, effectively supplementing existent network infrastructure by allowing mobile avatars to replace network terminal nodes. Early experiments prior to TOURBOT have been conducted at the Deutsches Museum Bonn with RHINO (see figure 1).
Preliminary System Architecture
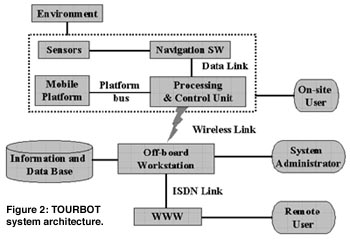
A preliminary architecture of the TOURBOT system is illustrated in figure 2. It shows the various system modules and the communication links that interconect them. As can be observed, there are two basic system components: (a) the mobile platform, including the sensors, navigation SW and processing & control unit and, (b) the off-board workstation that has access to the information base and also administers the internet connection to remote users.
The Consortium
The TOURBOT project is pursued by a consortium that comprises an ideal blend of technical partners (Foundation for Research and Technology - Hellas, Greece; University of Bonn, Germany; THEON Mobile Platforms, Greece; University of Freiburg, Germany), brokers of technology to museums (Foundation of the Hellenic World), and end users (Foundation of the Hellenic World, Greece; Deutsches Museum Bonn, Germany; Byzantine and Christian Museum of Athens, Greece).
Links:
Project URL: http://www.ics.forth.gr/tourbot
Please contact:
Panos Trahanias - ICS-FORTH
Tel: +30 81 391 715
E-mail: trahania@ics.forth.gr