

by Liliane Peters, Michael Pauly and Klaus Beck
The challenge in the control and behavior of a team of autonomous robots in indoor environments is mainly in the high uncertainty existing in the environment. The type of uncertainty can be classified as sensor dependent, information dependent, and communication dependent. The objective of the Robots in Buildings team of the Institute for Autonomous intelligent Systems at GMD focuses on the development of reliable, effective and scalable service architecture for autonomous service robots able to service in structured indoor or restricted outdoor environments. The demonstrators are industrial robot platforms that are enhanced with a service system approach. The proposed solution is platform independent and can be directly transferred to industrial environments.
The complexity of service environments is quite high and very different from building to building. Structural elements like corridors, offices, or halls, are different. Corridors can have a various width, length and illumination types. The number of offices and their shapes depend not only on the year the building was constructed, but also on the type of company using it. In addition to this, the corridors and connections between floors have all different doors, elevators, stair-cases, etc. To comply with the complexity in these ‘work environments’ calls for the autonomous system to be able to navigate collision free through all the floors, separated by doors and elevators as well as to adapt, foresee and react to dynamic changes in the environment, like the occlusion or partial occlusion of corridors by objects or employees co-working in the same environment.
To solve this dilemma between the required high complexity of the mobile service robots and the economic constraints related to efficiency, costs, etc., we propose a new approach to service robots operating in structured in-door environments. This approach is based on the particular ‘robot intelligence’ needed for each part of the ‘work environment’. In our understanding robot intelligence means the capability of a computer-based mobile system to navigate reliable between two points within the environment independent of the complexity and the steady changes of the environment The approach proposes the distribution of the needed ‘intelligence’ capability between the ServiceBots (mobile systems) and other systems like software agents (SoftBots) or embedded systems (FixBots) co-existing within the same environment. Thus any navigation task can be solved through the co-operative work of a number of ‘Bots’. As a result each ServiceBot needs only a ‘medium intelligence’, but needs prime communicative capabilities with its peers.
A ‘medium intelligent’ robot is able to navigate without co-operative support in parts of the work environment with average complexity. When the complexity of the environment increases, some additional FixBots or SoftBots will support the navigation process. The ServiceBots , FixBots, and SoftBots form a cluster of fixed and mobile autonomous intelligent systems operating within a given ‘work environment’. The major link between all these ‘Bots is the IT backbone (LAN) of the building. As the LAN is also the major communication medium for humans in modern enterprises, the users or the supporting team of the service system can request services ask for information, monitor, etc. from any computer (fixed or mobile) within the work environment. Due to security reasons the access of users is limited to all the persons having a registered user account in the test environment
The number of elements of the co-operative service team are calculated as follows: The number of ServiceBots is dependent on the number of requested tasks per day and hour. The number and the type of FixBots is defined by the complexity of the environment. The number of Softbots is dependent on the degree of reliability of services requested. The higher the reliability and the longer the service time the higher the number of monitoring agents insuring the requested quality of service
GMD-Robobench
The GMD-Robobench is our experimental environment and test bed. It consists of two buildings which are connected by a glazed corridor and a lane in the backyard connecting the two buildings. Each of these buildings has three floors which can be reached by lift. Each floor is subdivided by several fire doors. A wireless based Ethernet network (IEEE 802.11) connects the ServiceBots or mobile humans to the fixed LAN in the GMD-Robobench environment. The FixBots servicing the ServiceBots are electronic driven doors accessed via a door-server, elevators accessed by an elevator server ,and some Web cameras. All FixBots are managed by a Resource Manager. The Problem Manager of the service system reports via e-mail any incident encountered during the service of any ServiceBot and can be used to monitor or support the service system remotely.
Navigation in Complex Environment through Co-operation
In the following two example of co-operative navigation are presented. The first complex environment is a glazed corridor between two buildings. The complexity is higher than the average as:
Each ServiceBot has only 2 wheel encoders and 2 laser sensors (one for each driving site – front and back) with an error up to 10 cm. With the given sensorial capabilities the robot is not able to insure the needed robustness of navigation. An additional web-camera installed in the area combined with a SoftBot can support the robot to improve the self localization process. Thus the support of the FixBot has to insure that the navigation through the elevator door is accurate and that by no mean the ServiceBot drives into the stair-case area. The service offered by the FixBot is to inform on request how large the deviation error from the ideal path of the ServiceBot is. It is up to the ServiceBot to correct its path or to ignore the information. If there is a mismatch between the real position of the robot and its own localization system, the ServiceBot will re-calibrate its own co-ordinate system.
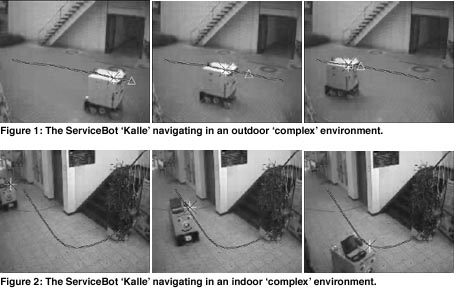
The second sequence presents the navigation path between the entrance of two buildings. Here the complexity of the environment is even higher than in the first case. The robot navigates on a virtual path only based on the wheel-encoder information. The laser sensor information supports only the local collision avoidance. To increase the robustness of the navigation for this environment a web camera with another softbot is situated in the environment. The FixBot monitors the navigation path of the robot checks if it fits the virtual one and suggests a correction if needed. As in the first case it is up to the ServiceBot to use the given information. The tracking of the ServiceBot –as there are several operating in the same environment – is started and stopped on request. The ServiceBot can leave or enter a building by requesting the support of the door-opening server. For this request of service the mobile system has to identify itself due to security and availability check reasons. This information can be sent to the FixBot too and start the monitoring process. If several possible navigation paths exist in the outdoor environment, these are identified by giving the destination entrance door to the FixBot. The tracking is stopped the moment the robot opens the entrance door to the next building.
Conclusion
Through the distribution of tasks between robots and the environment and the open standardized communication system, the service system can be scaled. The number of robots working in an environment can be increased or decreased without changing the service structure of the system. Heterogeneous robots can operate in the same environment as long as they use the same communication channel. The service system can easily be redesigned to another environment just by redistributing the FixBots or adding some SoftBots. Last but not least through the reduced number of sensors available on the ‘medium intelligent robot’ the proposed service system becomes affordable for many application in the area of: health care, administrative buildings and even industrial manufacturing lines, while guarantying an agreed level of quality of service.
Links:
The ROB group: http://ais.gmd.de/ROB/
Please contact:
Liliane Peters - GMD
Tel: +49 2241 14 2332
E-mail: liliane.peters@gmd.de