

by Stefano Nolfi and Dario Floreano
Evolutionary Robotics is a new technique for the automatic creation of autonomous robots that gains its inspiration from the Darwinian principle of selective reproduction of the fittest. It is a new approach that looks at robots as autonomous artificial organisms, which develop their own skills in close interaction with the environment and without human intervention.
 One of the main problems in designing mobile robots is that their behaviour is the result of the dynamic interaction between the robot and the environment. The robot and the environment can be described as a dynamic system because the sensory state of the robot at any given time is a function of both the environment and of the robot’s previous actions. The fact that behaviour is an emergent property of the interaction between the robot and the environment has the interesting consequence that simple robots can produce complex behaviour. However it also implies that the properties of the emergent behaviour cannot easily be predicted or inferred from a knowledge of the rules governing the interactions. The reverse is also true: it is difficult to predict which rules will produce a given behaviour, since behaviour is the emergent result of the dynamic interaction between the robot and the environment. This problem can be overcome by viewing robots as autonomous artificial organisms that develop their own skills in close interaction with the environment through an automatic process based on artificial evolution. By relying on an evaluation of the entire behaviour of individuals, this scheme releases the designer from the burden of identifying the rules that will result in the desired behaviour and allows the exploitation of emergent forms of behaviour (ie behaviour which heavily relies on the interaction between the robot and the environment).
One of the main problems in designing mobile robots is that their behaviour is the result of the dynamic interaction between the robot and the environment. The robot and the environment can be described as a dynamic system because the sensory state of the robot at any given time is a function of both the environment and of the robot’s previous actions. The fact that behaviour is an emergent property of the interaction between the robot and the environment has the interesting consequence that simple robots can produce complex behaviour. However it also implies that the properties of the emergent behaviour cannot easily be predicted or inferred from a knowledge of the rules governing the interactions. The reverse is also true: it is difficult to predict which rules will produce a given behaviour, since behaviour is the emergent result of the dynamic interaction between the robot and the environment. This problem can be overcome by viewing robots as autonomous artificial organisms that develop their own skills in close interaction with the environment through an automatic process based on artificial evolution. By relying on an evaluation of the entire behaviour of individuals, this scheme releases the designer from the burden of identifying the rules that will result in the desired behaviour and allows the exploitation of emergent forms of behaviour (ie behaviour which heavily relies on the interaction between the robot and the environment).
Artificial evolution has been used to develop robots displaying non-trivial behaviour such as navigating and exploring a non-stationary environment, collecting garbage and discriminating different types of objects, walking, navigating in an environment by periodically returning to a recharging station, etc. Current research aims both to increase our understanding of natural systems by developing bio-inspired applications and to develop applications that are interesting from an engineering point of view.
A key question in evolutionary robotics is how artificial evolution can select individuals capable of displaying complex behaviour (eg navigating in a complex environment). A related problem in evolutionary biology is to understand how and under what circumstances natural evolution may discover new competencies (eg, the ability to fly or build a nest). If one wishes to select individuals capable of solving a task that requires a specific competence through artificial evolution, the easiest thing to do is to select the individuals for their ability to solve that specific task. This amounts to designing a fitness criterion that scores individuals according to their ability to solve the task. However, it is easy to show that this simple strategy can only work for simple tasks. As the complexity of the task increases, the probability that some individuals of the first generation are able to accomplish, at least in part, the task is inversely proportional to the complexity of the task itself. For complex tasks, all individuals of the first generations are scored with the same null value, and as a consequence the selection process cannot operate.
One way to solve this problem is to set up a self-organizing process capable of producing incremental evolution (ie an evolutionary process in which the complexity of the selection criterion progressively increases with new generations). This ideal situation spontaneously arises in competing co-evolving populations with coupled fitness.
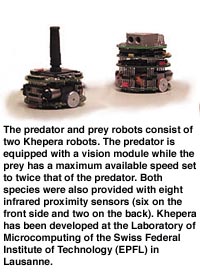
For this reason we recently carried out a joint project in which we co-evolved two populations of predator and prey robots that were selected for their ability to catch prey and to escape predators, respectively. At the beginning of the evolutionary process, predators should be able to catch prey which have a very simple behaviour and are therefore easy to catch; likewise, prey should be able to escape simple predators. However, later on, both populations and their evolving challenges become increasingly complex. Therefore, even if the selection criterion remains the same, the adaptation task becomes progressively more difficult. Results obtained demonstrate that competitive co-evolution can lead to an open-ended process where the emergence of progressively more complex solutions can be observed.
The latest results obtained in the field of Evolutionary Robotics and, in particular, the experiments carried out at the Institute of Psychology of National Research Council (CNR) in Rome and at the Laboratory of Microcomputing of the Swiss Federal Institute of Technology (EPFL) in Lausanne will be reported in a forthcoming book [Nolfi and Floreano (in press). Evolutionary Robotics: The Biology, Intelligence, and Technology of Self-Organizing Machines. Cambridge, MA: MIT Press/Bradford Books]
Links:
http://gral.ip.rm.cnr.it/nolfi/robotics.html
http://gral.ip.rm.cnr.it/nolfi/
http://diwww.epfl.ch/lami/team/floreano/
Please contact:
Stefano Nolfi – Institute of Psychology - CNR
Tel: +39 06 8609 0231
E-mail: nolfi@ip.rm.cnr.it