

by Martin Nilsson
The DRAGON research project at SICS studies problems occurring in a framework of autonomous robots, which build structures by connecting to and disconnecting from each other. Research topics include methods for learning and adaptation of locomotion and reconfiguration; sensing and control of distributed mechatronic systems; and the closely related complexities of algorithms and mechanisms.
A characteristic of robotics is its wide interdisciplinary span from theory to practice in Applied Mathematics, Computer Science, Electrical Engineering, and Mechanical Engineering. Optimal – or perhaps even successful – performance of a robot system requires skillful application of all these disciplines, as well as close interplay between far ends of the spectrum. Software can never fully compensate for hardware mistakes, and vice versa. This is a recurring observation through our research results, some of which are described below.
The bottom line motivation of this research at SICS is the focus on interaction and communication between software and the physical environment, the ‘real world’. Potential applications exist in health care, service robotics, and entertainment industry. Further ahead lie more speculative applications, such as reconnaissance and rescue missions after accidents or catastrophes.
Learning Snake Robot Locomotion
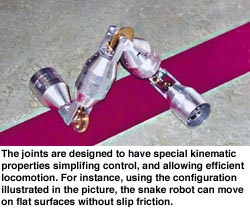
Snake robots have many degrees of freedom, and it is difficult for a human programmer to write a program for controlling all the degrees of freedom. We have used reinforcement learning with on-line simulation in order to learn creeping locomotion. Care must be taken when designing the robot, so that an efficiently computable mathematical model can describe it for achieving fast simulation. This is one example where the mechanical design directly determines algorithmic performance (see left figure). Another example is when we want to compute the closed-form inverse kinematics of sections of the snake robot. The complexity of Grobner base methods is exponential in the number of variables in the equations describing the robot joints. Thus, it is essential that the joints be designed to maximize the number of symmetries, since each symmetry eliminates one variable.
Single-wire Tactile Sensors
Autonomous robots need tactile sensors to feel the environment. If the sensors are distributed all over the surface of the robot, the extensive wiring can become a problem. We have shown that an LC network can be used as a tactile sensor with a minimal amount of wiring. Here, the LC network is used as a filter. Pressure applied on the sensor changes the filter characteristics, and can be computed unsing the filter’s impulse response. For practical application of this technique, it is necessary to find a fast way of computing the Neumann expansion of a function, ie expansion in terms of Bessel functions. We have developed a method which computes the expansion in O (n log n) time, the same complexity as an FFT. This is a case where the existence of a fast algorithm allows an particularly efficient mechatronic solution.
Autonomous Docking
Docking two robots autonomously is a difficult task, especially in the real world, which includes noise and dirt. A robust interconnection usually involves a phase of precise navigation, which is hard to accomplish with ordinary sensors and connecting devices. We have studied how geometric optimization can be used in robots for autonomous docking, so that they become self-alignable to a high degree.
‘Best’ Possible Mechanisms
The complexity and limits of what a robot control algorithm can do depend on the complexity and capabilities of the physical robot. For instance, algorithms for vertical climbing by a snake robot depend critically on joint range and strength. The determining component in the joint itself is neither the motor, nor the transmission, but the brakes, holding the joint in a fixed position. We have found that it is possible to calculate a non-trivial lower bound on the size of a brake over all possible mechanisms, given a certain load. A brake can be designed which approaches this bound to within an order of magnitude, while conventional brakes are typically three orders of magnitude weaker.
About the Project
DRAGON is an abbreviation of ‘Distributed Real-time Autonomously Guided OrgaNisms’, and belongs to the Real-World Computing Project (RWCP), together with several other international and Japanese partners. RWCP is financed by the Japanese Ministry for Trade and Industry (MITI). DRAGON is a five-year project ending in 2002. It is a continuation of the RWCP PIRAIA project, which started in 1993. We have enjoyed many rewarding discussions with members of the Snake robot group of GMD in Sankt Augustin.
Links:
PIRAIA DRAGON:
http://www.sics.se/~mn/dragon.htm
Please contact:
Martin Nilsson - SICS
Tel: +46 8 633 1574
E-mail: mn@sics.se