

by Jean-Pierre Merlet
The SAGA research team at INRIA Sophia Antipolis develops a micro-robot to be used in medical and industrial inspection applications as, for example, in minimally invasive surgery.
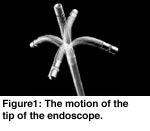
Endoscopy is an important tool for industrial inspection and minimally invasive surgery which enable to get images from remote locations within an industrial plant or a human body. An endoscope is basically a flexible beam in which the orientation of the last ten centimetres may be controlled by pulling wires at the free-end of the endoscope (see figure 1). This type of control has two main drawbacks: first, a change in the orientation of the tip of the endoscope imply also a translation of this tip, which may not always be possible if the diameter of the pipe is too small and second an accurate positioning of the tip is not possible due to the friction in the wire guide and potential energy storage in the wire that act like springs. Hence most endoscope are used only for diagnostic purposes but not for direct operations.
A possible way to correct these drawbacks will be to add at the tip a micro-robot that will offer a local accurate mobility. After discussion with surgeons from INSERM we have decided to design such a micro-robot with the aim at using it for intestinal minimally invasive surgery. A consensus on the requirements for this robot has been established with the surgeons: its diameter should be approximatively 1cm (which is the diameter of the endoscope used for this type of surgery), it should have three degrees of freedom (one translation of about 3mm and two rotations of about 30 degrees) and its accuracy should be less than 1/10 of mm. But the most difficult requirement to fulfil was the force requirement: although in the operating mode the robot will have to produce a small force (equivalent to a load of about 15 grammes) to cut human tissue, it should be able to sustain the very large forces that are produced when inserting the endoscope. Fortunately a specific mechanical architecture, the parallel robot, fit the previous requirements: the chosen mechanical principle is shown in figure 2.



The end-effector of this robot is connected to its base by three legs which are attached to the end-effector by ball-and-socket joint. The other extremity of the leg is attached to a revolute joint and linear actuator enable to change the height of these joints. By changing the three heights it is possible to translate the end-effector along the vertical direction and to rotate it around the two horizontal axis.
A preliminary prototype of 1cm diameter has been designed for testing the feasibility of this project (see figure 3).
A joint French-Israeli project with the laboratory LMARC from Besancon and the Technion from Haifa has been established for developing such micro-robot within the framework of the ‘Factory of the Future’ project.
The Design Problems
Various problems have to be addressed before moving on a pre-industrial version of MIPS. First we have to deal with technological issues such as finding the appropriate actuators and sensors. After investigating various possibilities we have decided to use three micro-electrical motors of 1.9mm of diameter from MicroMotor, whose rotation motion will be converted into a linear motion with a screw, and three LVDT sensor of 1.5mm of diameter from MicroStrain (that limit the stroke of the linear actuator to 6 mm). We have then to figure out what should be the dimensions of the various components of the robot so that the surgeons requirements will be fulfilled. This problem is known as the ‘optimal design’ problem and is usually quite complex. It involves analysing and solving a large number of systems of equations, a problem which is the kernel of the SAGA project. For MIPS we have developed various tools based on exact or approximate computation that enable to determine the best design.
The New MIPS
As the best robot geometry has been determined we have decided to build a new prototype of which a CAD model can be seen in figure 4.
When the linear actuators are fully retracted this prototype looks like a cylinder of diameter 7mm. This prototype will be available at fall 2000 for preliminary tests and control algorithms will be developed before the end of this year.
Conclusion
After completing the tests for the control of the new prototype we intend to use the motor current measurement to evaluate the forces and torques exerted by the end-effector. This will enable the surgeon to get a force-feedback from the robot, that will complement the visual feedback provided by the endoscope. A third medical version of the prototype will be then built and proposed for clinical tests.
Links:
SAGA research team: http://www-sop.inria.fr/saga/saga.html
Please contact:
Jean-Pierre Merlet - INRIA
Tel: +33 4 9238 7761
E-mail: Jean-Pierre.Merlet@inria.fr