

by Eve Coste-Manière
Surgery now uses robotic and image processing systems in order to interactively assist the medical team, both in planning the surgical intervention, and in its execution. The objective of this new technique is to enhance the quality of surgical procedures by minimizing their side effects (smaller incisions, lesser trauma, more precision,...), thus increasing patient benefit while decreasing the surgical cost. These techniques are being successfully introduced in several areas of surgery: neurosurgery, orthopaedics, micro-surgery, cardiovascular and general surgery etc.
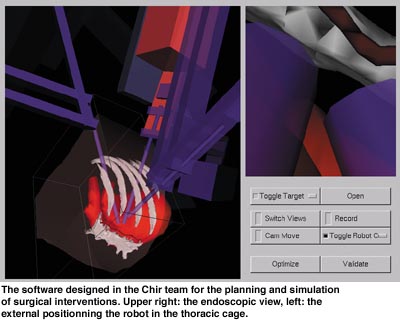
Three main steps can be pointed out in a general robotic surgery intervention: data acquisition and subsequent planning, intra operative assistance, and post-operative patient control. In the pre-operative phase, a patient dependent model of the rigid (eg bones), and de-formable (eg the heart) anatomical entities involved in the surgical act have to be built. For this, several medical imagery techniques (MRI, Scanner, Ultrasonics, etc.) are used, where the anatomical structures are detected, located and modelled. In the same time, the mechanical model of the robotic system is fused in an overall geometric model. This will be used to describe and simulate the different potential problems that may occur during the intervention.
The results obtained in the planning phase are then calibrated and put in correspondence with patient in intra-operative situation. As a consequence, the robotic system is able to provide interactive assistance/guidance, and to constrain the movements of the surgeon in order to perform, with the desired precision, the possibly pre-defined procedure (eg neuro-surgical biopsy). In some cases, the robot may have an autonomous behaviour in order to realize a dedicated and fixed part of the procedure (eg thighbone drilling for artificial hip installation).
As for tele-operated robots, the surgeon through a master console benefits from an enhanced (sometimes 3D) vision of the organs. In addition, augmented reality would allow the overlay, in real-time, of the pre-operative data of the patient during the intervention. The surgeon movements may be reduced to increase precision, and smoothed to avoid hand tremor by virtue of a decoupled master/slave unit.
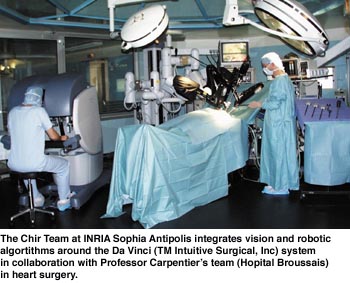
INRIA Sophia Antipolis (Chir Robotics Medical Team) is directing its efforts towards this specific application field. In particular, a recent French National Research Grant ‘Telemedecine’ realized in collaboration with Pr. Alain Carpentier’s heart surgery team, has been initiated and is now in progress. Fundamental research in key areas of robotics surgery are being studied: the modelling of de-formable organs (eg the heart), planning and simulation of robotics procedures (eg using the Da Vinci robotic system), safe & real-time integration with augmented reality. Our major concern is having a safe and robust software, especially in what concerns software integration of various disciplines. Several efforts in computer science have been devoted to develop modular and safe control mechanisms of software components used in robotic systems. This is the case of the Orccad/Maestro initiative at Inria, which is a software integration environment for the design and validation of complex robotic tasks. The fundamental properties required on such software systems can be validated beforehand, using formal verification of their logical behaviour, thus enforcing system safety.
The project’s second priority is the demonstration of the validity of the developed research and tools through experimentation (eg in coronary artery bypass in heart surgery), and through industrial transfers towards specialized partners.
Links:
Chir Medical Robotics Team: http://www.inria.fr/chir/
Please contact:
Eve Coste-Manière - INRIA
Tel: +33 4 92 38 76 26
E-mail: Eve.Coste_Maniere@sophia.inria.fr