Control Theory and Electro-elasticity: Realisation of an Active Damper
by Maurizio Brocato
Interaction between mechanics and electronics is paramount in the design of sensors and actuators. At IEI-CNR, a system based on the electrorheologic properties of a colloidal suspension, capable of damping mechanical vibrations of small amplitude has been conceived and developed.
Sensors and actuators are often developed using materials with particular electromechanical properties; their modelling as continua with microstructure differs from ordinary cases because of the possibility of controlling, at least in part, their microstructure. The design and optimisation of such devices utilises the mathematical theory of distributed controls. We deal with a problem of this type, but the case at issue differs from those prevalently analysed in the literature (mainly after the work of J. L. Lions) as some of the mechanical constitutive parameters may be altered, within limits, at will.
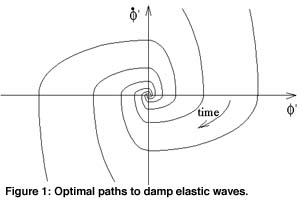
In a previous paper the author suggested an application of Pontryagin’s Maximum Principle to find optimal control paths for such ‘controllable’ materials. The example of how mechanical waves can be damped, within given optimality requirements, in a body of which the elastic response can be controlled was given. The optimal path to be followed in order to minimise the kinetic energy in the shortest time, is of the type shown in Figure 1 on a deformation vs. rate of deformation plane: the body has to be as stiff as possible when its kinetic energy transforms into an elastic one, and as soft as possible under the opposite circumstances. Energy is thus dissipated due to the discontinuities of the elastic
behaviour in time.
To implement this control strategy and build an active device capable of damping vibrations, we need a fit actuator: a material with elastic modulus that can be controlled and modified sufficiently quickly to switch from its softest to its stiffest configuration four times during each period of the unwanted oscillation. Electrorheologic (ER) materials meet these requirements.
ER materials are colloidal suspensions of dielectric particles in a dielectric fluid, characterised by the Winslow effect. Applying an electric field, the suspension aggregates in columns orthogonal to the equipotential surfaces of the field. This phenomenon is primarily due to charges that accumulate at the interface between fluid and particles causing the latter to behave like dipoles. Thus, acting on the electric field, the microstructure of the mixture and therefore its gross mechanical properties can be modified. The mathematical model of such a sudden change of phase is particularly interesting and will be studied in the near future.
The particles’ organisation in columns is reversible and ruled by a threshold of the electric field (a characteristic of the particular material employed, which, typically, ranges from 2 to 3 MV/m) above which it cannot be observed. The time needed for the organisation or its decomposition is in the order of 1 ms.
This effect is well known since Winslow’s work in 1949. We focus on a particular aspect of it which, so far, has been given little attention in applications: it gives the mixture – considered as a (perhaps composite) continuum - the typical behaviour of a Bingham body. When the suspension is organised in columns, applying a small mechanical force, the system reacts as a linear elastic solid, ie with a small displacement proportional to that force. This can be explained by the fact that the columns are neither destroyed nor rearranged during this process: they shear and bend as if they were very many small beams within the fluid matrix (of which the dynamic influence is probably negligible for such small displacements).
In our experimental set up, two conducting cylinders are free to move one into the other only along their common axis; both are in contact via a suspension of starch into silicon oil filling the thin space in between them, but otherwise electrically separate. When a relatively small motion occurs the sheared ER material reacts elastically, provided there is a sufficient difference of potential between the cylinders.
To realise the control algorithm, an LVDT (Linear Variable Differential Transformer) sensor captures the relative displacement of the cylinder and informs a computer of the current kinematic state. Once converted in terms of the phase variables of Figure 1, this information is sufficient to decide whether to switch on or off the electric field and thus drive the process along the desired path. The switch needed to interrupt about 2mA at 3kV in a few ms has been implemented using a beam triode.
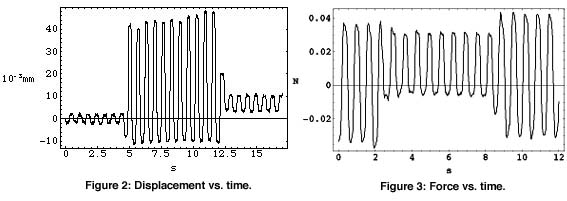
The plots in Figure 2 and Figure 3 show the effect on displacement and force of two opposite steps (on/off/on) of the electric field.
Please contact:
Maurizio Brocato - IEI-CNR
Tel: +39 050 593 422
E-mail: brocato@iei.pi.cnr.it