Hepatic Surgery Simulator
by Hervé Delingette
In the past decade, minimal invasive surgery has seen a strong development over more traditional surgical techniques. The main advantage of minimal invasive surgery is to avoid the traumatism linked to the opening of the patient's body. In the case of laparoscopy, a video camera and few surgical instruments are introduced inside the abdomen through small openings. This technique has the advantage of being less invasive and therefore of shortening the stay of the patient at the hospital. However, minimal invasive surgery requires specific training due to the difficulty of moving a three-dimensional tool by looking at a two-dimensional video image which creates a problem of hand/eye coordination. Furthermore, the gestual dexterity is strongly reduced due to the shape of surgical instruments.
The purpose of this common research project between INRIA and IRCAD (Institut de Recherche contre le Cancer de l'Appareil Digestif) is to provide computer software allowing:
- the teaching of the liver anatomy from three-dimensional computer generated images
- the gesture training of a surgeon by simulating the interaction of various surgical tools with the organs of the abdomen
- the planning of the resection of hepatic segments from the CT-scan images of a patient.
There are several advantages of a computer-aided simulator over current training techniques (mechanical simulator, training on cadavers or animals). Such a simulator would give an objective evaluation of a surgeon dexterity combined with a more intensive training activity. It would allow the simulation of rare pathological cases and could simulate the interaction with several organs.
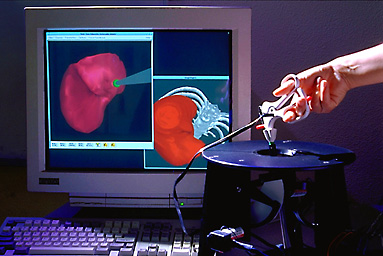
Simulation of a surgical operation on the liver. Interaction with a deformable model of the liver using a force feedback system. (Photo: Eidelman)We have developed an hepatic surgery simulator that couples visual with force feedback. The force feedback allows the surgeon to feel the anatomical structures that it is interacting with. The geometric model of the liver is extracted from CT-scans of the abdomen acquired with contrast agent. An optimized method of deformation based on linear elasticity, provides real-time computation of the deformation as well as the associated reaction forces.
Please contact:
Herve Delingette - INRIA
Tel: +33 4 93 65 77 64
E-mail: Herve.Delingette@sophia.inria.frStephane Cotin - INRIA
Tel: +33 4 93 65 76 63
E-mail: Stephane.Cotin@sophia.inria.frJacques Marescaux - IRCAD
Tel:+33 3 8811 6268
Fax: +33 3 8811 6265