
by L. Azzarelli, M. Chimenti, E. Fantini, and A. Marchetti
In the context of the CNR Special Project for "Robotics", a workstation has been implemented at IEI-CNR for the acquisition of volumetric data derived from non-flexible material. The station can be used to perform morphological analyses on the surfaces of finished samples and to investigate their internal structure. Envisaged applications include the characterization of materials or of manufactured goods and the construction of multidimensional reference models to be used in medicine, botany, mineralogy.
The workstation consists of a processing system and a special, numerically controlled device which manages an electromechanical system with two axes, one for rotation and one for translation (see Figure 1). The sample to be examined is embedded in resin and fixed on a rotating board that is located under a moving platform transporting a tool (for example a cutter) and a telecamera. The two axes which control the movement of the sample and its treatment are managed so that the sample is first worked by the cutting tool and then moved under the telecamera that takes shots of the finished surface. At the end of the process, a series of images of parallel and equidistant sections of the sample will have been acquired.
Figure 1: The Visiolam workstation
The software system consists of a program for management and processing that automatically controls the acquisition/working cycle. This is defined on the basis of the specific parameters of the material to be analysed and the type of investigation requested. In a preliminary stage, the graphic interface permits the user to select the speed of rotation of the tool, the depth of incision, the number of cycles to be executed, and the processing procedures to be activated. The system then pre-processes the data obtained in real time digitizing and storing the images. Operations of restoration, enhancement, segmentation and the vectorization of significant edges can be executed.
Thanks to the high mechanical precision of the device, the images obtained at different depths are accurately registered. Volumetric matrices of data can be constructed and used for the 3D rendering of iso-surfaces and for tomographic reconstruction employing parameters input by the user. Figure 2 shows an example of a 3D reconstruction derived from 60 sections of an animal bone sample. A section has been cut out of the image so that the internal features can be seen.
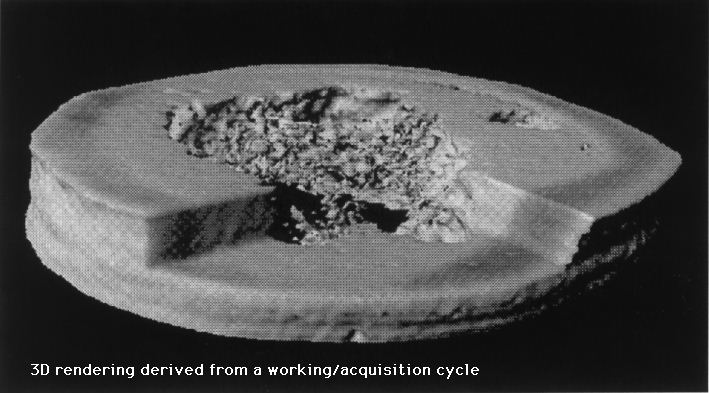
Figure 2: 3D rendering derived from a working/acquisition cycle